Procedural Processing of LiDAR Point Clouds
This project explores a procedural workflow for processing LiDAR datasets and reconstructing terrain environments from raw point cloud data.
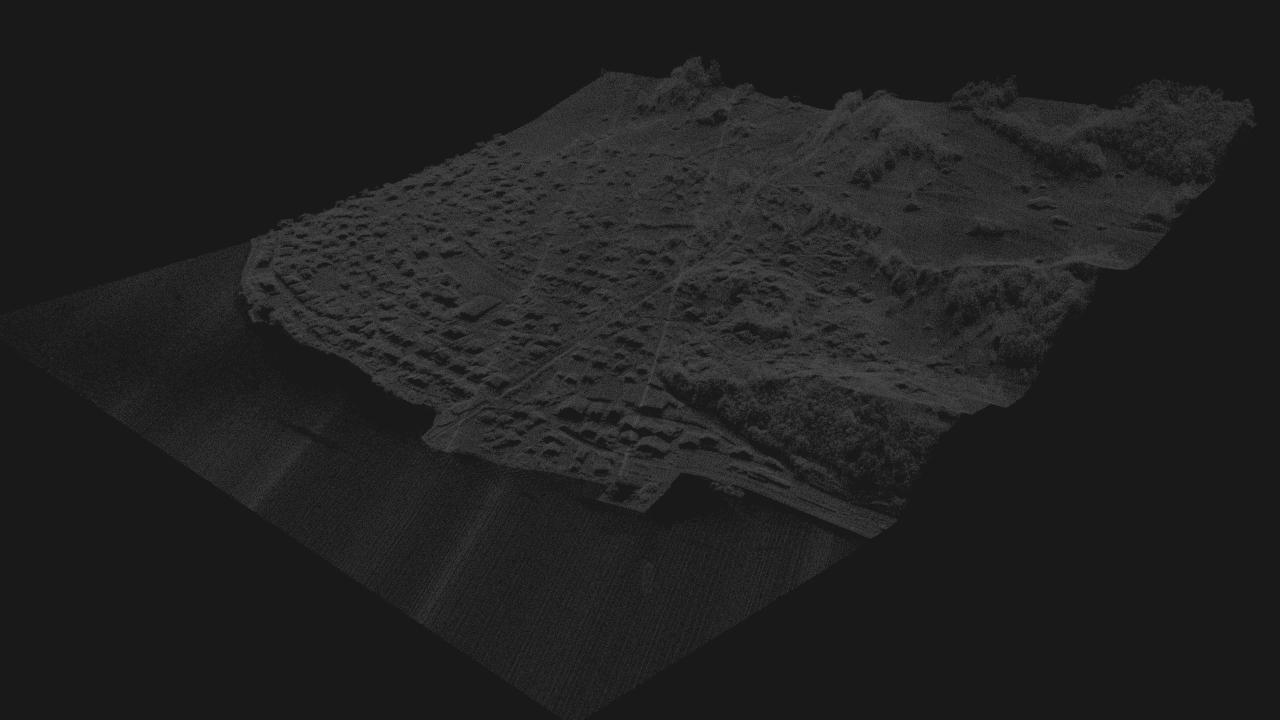
The dataset used in this experiment comes from the SwissSurface3D LiDAR dataset provided by Swisstopo, which contains high-resolution airborne laser scanning data covering Switzerland.
Dataset: SwissSurface3D Provider: Swisstopo (Federal Office of Topography) https://www.swisstopo.admin.ch/en/height-model-swisssurface3d
SwissSurface3D provides a high-resolution Digital Surface Model (DSM) generated from LiDAR measurements with sub-meter accuracy.
The dataset includes:
- terrain elevation
- vegetation
- buildings
Processing Pipeline
The LiDAR processing pipeline used in this project follows a series of procedural steps.
The following diagram illustrates the procedural pipeline used to transform raw LiDAR data into structured terrain and environment representations.
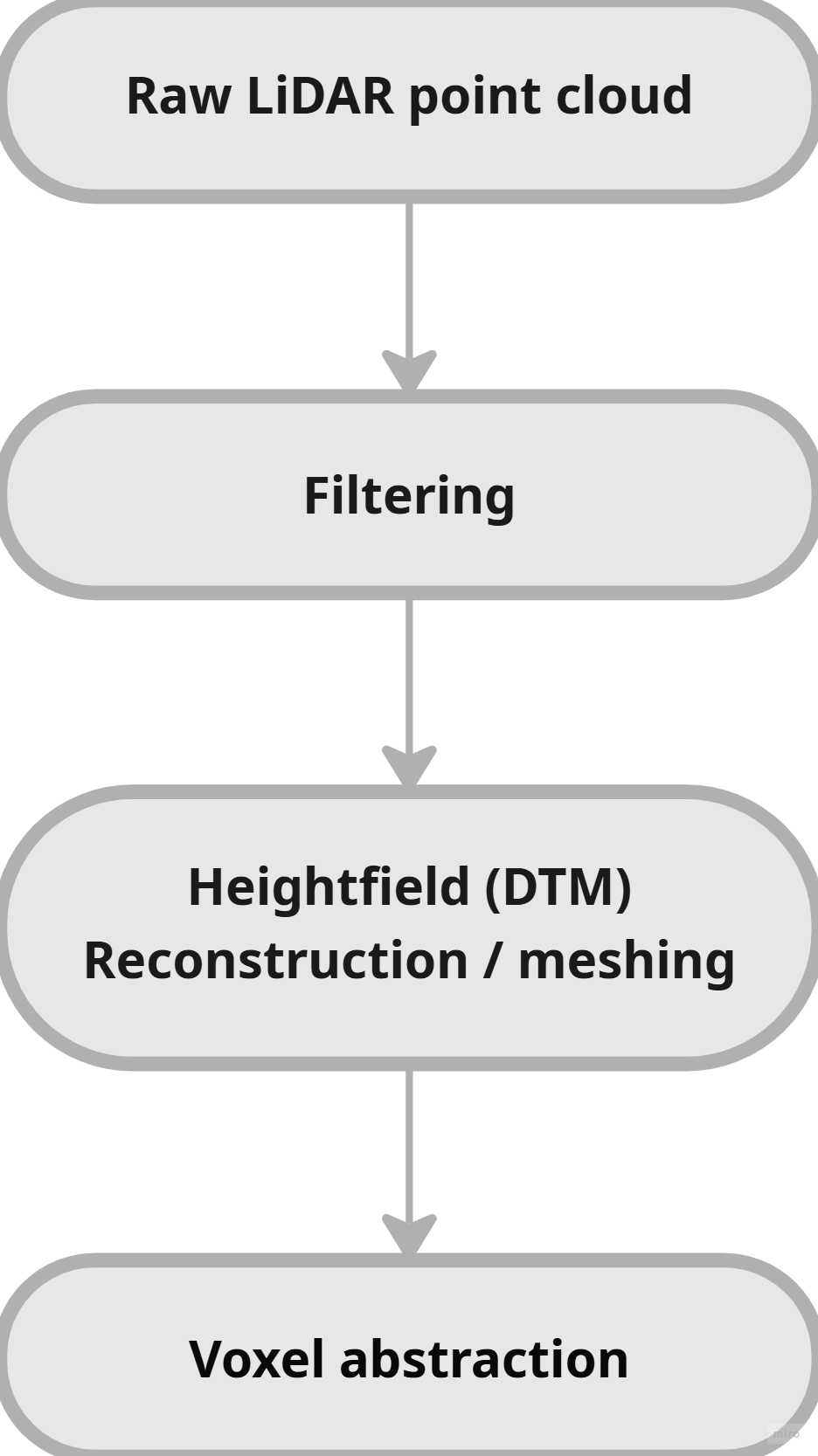
Each stage transforms the dataset into a more structured representation that can be used in simulation, visualization, or procedural generation systems.
Classification
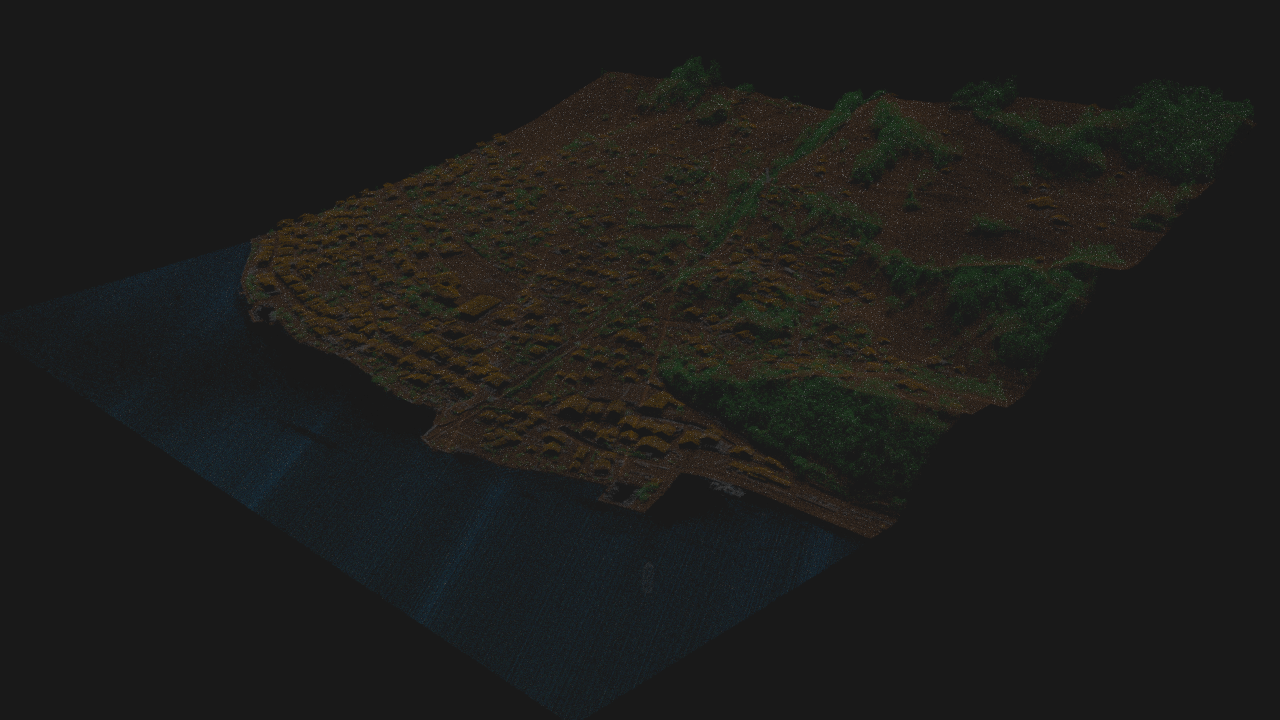
- water → blue
- terrain → brown
- vegetation → green
- structures → yellow
The point cloud is classified into semantic categories including:
- water
- vegetation
- grounds
- builings
Heightfield Reconstruction
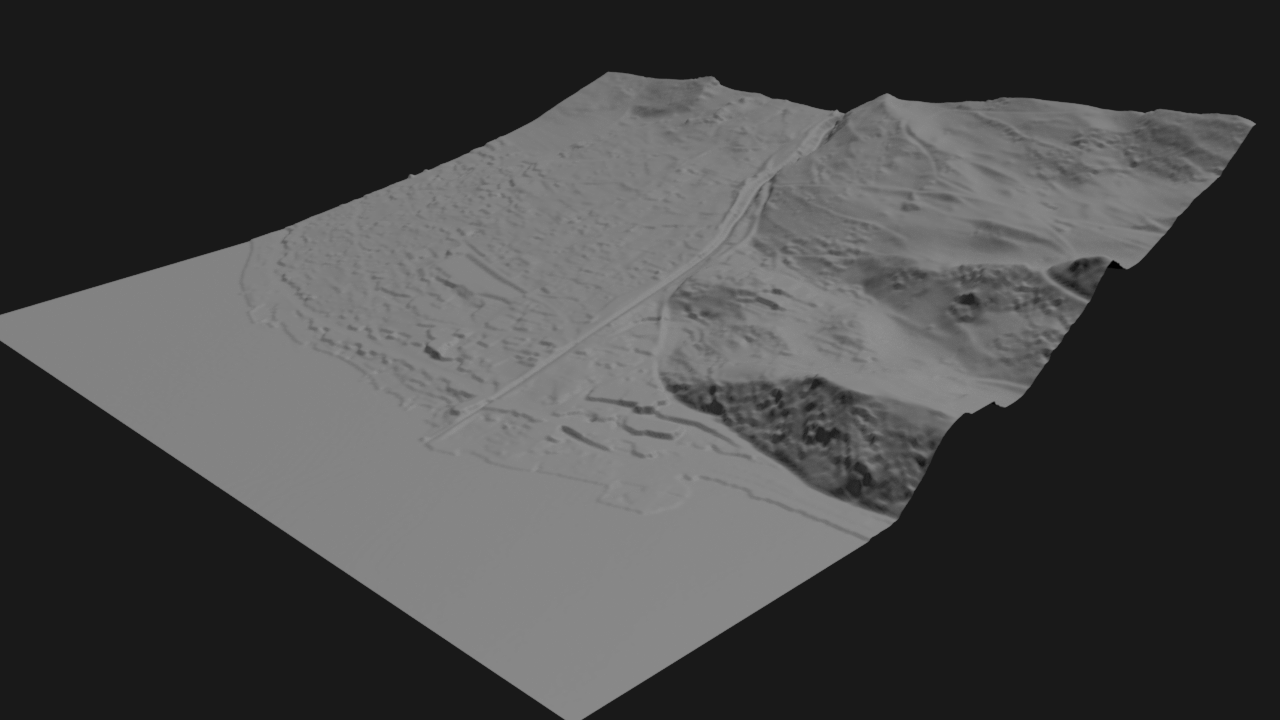
This image shows the terrain heightfield reconstructed from LiDAR data.
Ground points extracted from the dataset are converted into a continuous heightfield representation, which provides a clean Digital Terrain Model (DTM).
This representation removes most vegetation and structural noise from the point cloud, allowing the underlying terrain morphology to become visible.
Voxel Representation
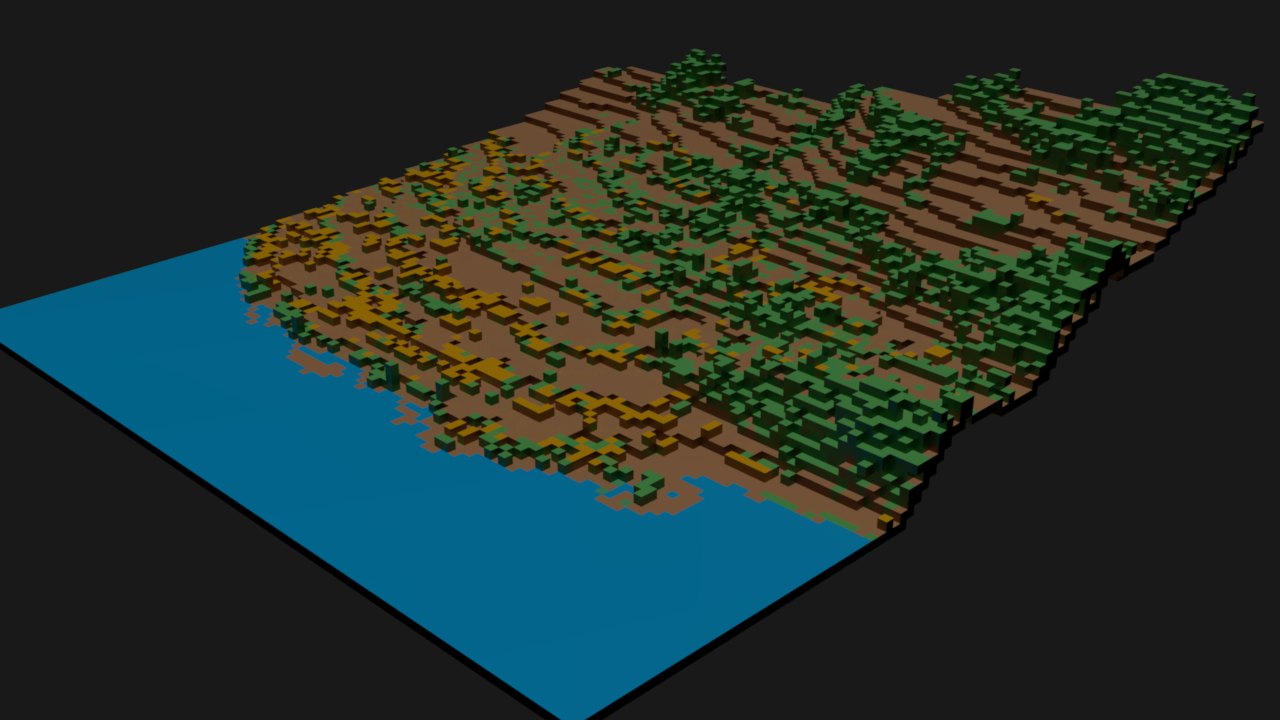
The reconstructed environment can also be converted into a voxel representation, which provides a grid-based spatial structure.
Voxel environments are useful for:
- simulation
- pathfinding
- robotics navigation
- destruction or physics systems
- machine learning input representations